



Posicionador de gir horitzontal de tres eixos / Posicionador de robot de soldadura
Paràmetres tècnics
| Posicionador servo triaxial de rotació vertical | Posicionador servo triaxial rotatiu horitzontal | ||||||
| Número de sèrie | PROJECTES | Paràmetre | Paràmetre | OBSERVACIONS | Paràmetre | Paràmetre | OBSERVACIONS |
| 1 | Càrrega nominal | 500 kg | 1000 kg | Dins d'un radi de R400 mm del segon eix | 500 kg | 1000 kg | Dins d'un radi de R400 mm/R500 mm del segon eix |
| 2 | Radi de giració estàndard del fus | R1200 mm | R1500 mm | R1200 mm | R1800 mm | ||
| 3 | Radi de giració estàndard del contraeix | R400 mm | R500 mm | R400 mm | R500 mm | ||
| 4 | Angle de gir del primer eix | ±180° | ±180° | ±180° | ±180° | ||
| 5 | Angle de rotació del segon eix | ±360° | ±360° | ±360° | ±360° | ||
| 6 | Velocitat nominal de gir ascendent del primer eix | 50°/S | 24°/S | 50°/S | 24°/S | ||
| 7 | Velocitat de rotació nominal del segon eix | 70°/S | 70°/S | 70°/S | 70°/S | ||
| 8 | Precisió de posicionament repetit | ±0,10 mm | ±0,20 mm | ±0,10 mm | ±0,20 mm | ||
| 9 | Dimensió límit del marc de desplaçament (longitud × amplada × alçada) | 2200 mm × 800 mm × 90 mm | 3200 mm × 1000 mm × 110 mm | 2200 mm × 800 mm × 90 mm | 3200 mm × 1000 mm × 110 mm | ||
| 10 | Dimensió total del canviador de posició (llargada × amplada × alçada) | 4000 mm × 700 mm × 1650 mm | 5200 mm × 1000 mm × 1850 mm | 4000 mm × 700 mm × 1650 mm | 4500 mm × 3600 mm × 1750 mm | ||
| 11 | Alçada central de la rotació del primer eix | 1350 mm | 1500 mm | 800 mm | 1000 mm | ||
| 12 | Condicions de subministrament d'energia | Trifàsic 200V ± 10% 50HZ | Trifàsic 200V ± 10% 50HZ | Trifàsic 200V ± 10% 50HZ | Trifàsic 200V ± 10% 50HZ | Amb transformador d'aïllament | |
| 13 | Classe d'aïllament | H | H | H | H | ||
| 14 | Pes net de l'equip | Uns 1800 kg | Uns 3000 kg | Uns 2000 kg | Uns 2000 kg | ||
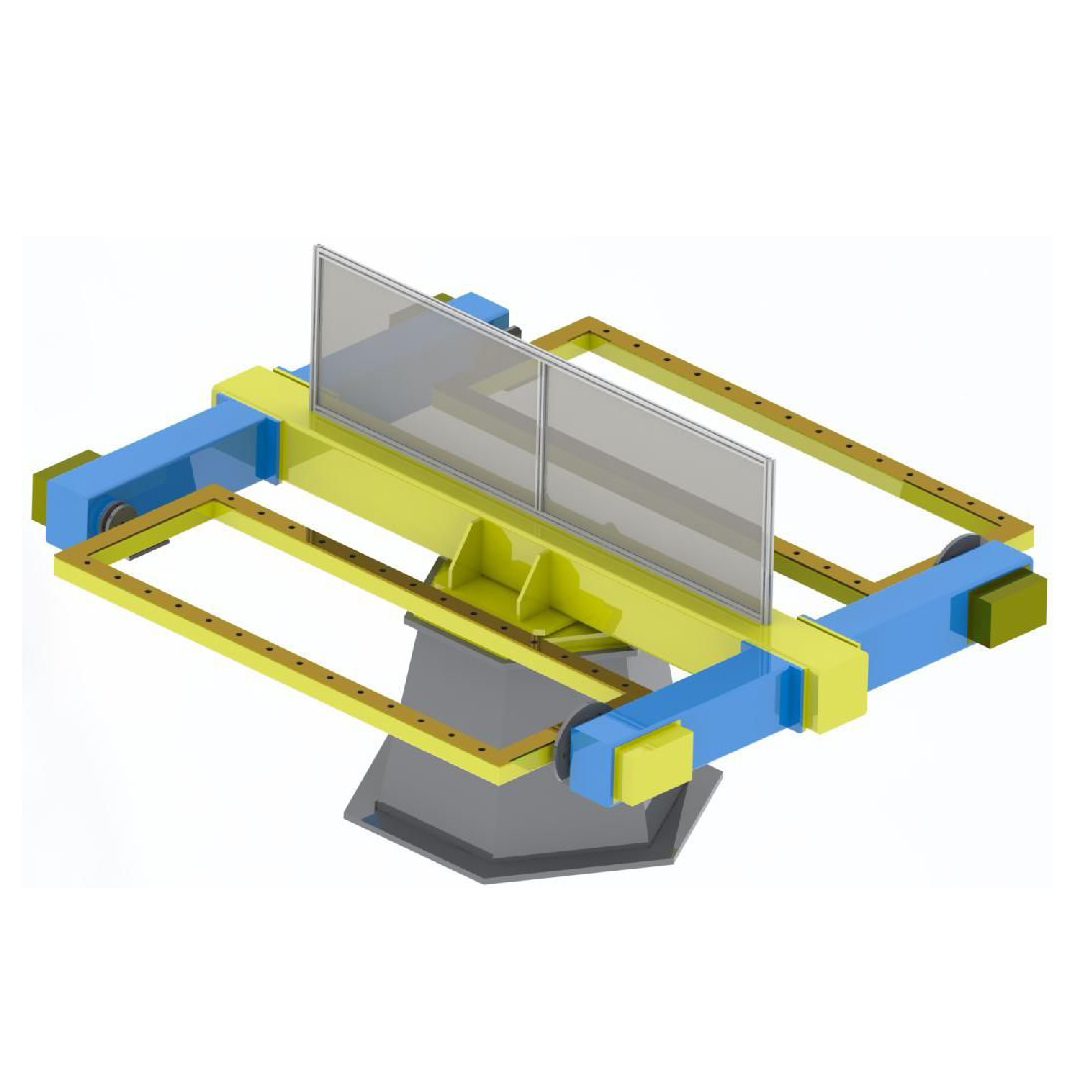
Posicionador servo triaxial rotatiu horitzontal

Posicionador servo triaxial de rotació vertical
Introducció a l'estructura
El posicionador servo triaxial de rotació vertical està compost principalment per un bastidor integral soldat, un bastidor de desplaçament de rotació, un servomotor de corrent altern i un reductor de precisió RV, un suport rotatiu, un mecanisme conductor, un escut protector i un sistema de control elèctric.
El marc integral soldat està soldat amb perfils d'alta qualitat. Després del recuit i l'alleujament de tensions, es processa mitjançant mecanitzat professional per garantir una alta precisió del mecanitzat i la precisió de les posicions clau. La superfície es ruixa amb pintura d'aspecte antioxidant, que és bonica i generosa, i el color es pot personalitzar segons els requisits del client.
El bastidor de desplaçament giratori s'ha de soldar amb acer perfilat d'alta qualitat i processar-se mitjançant mecanitzat professional. La superfície s'ha de mecanitzar amb forats roscats estàndard per al muntatge de les eines de posicionament, i s'ha de pintar, ennegrir i tractar la prevenció de l'òxid.
El servomotor de corrent altern amb reductor de RV es selecciona com a mecanisme de potència, que pot garantir l'estabilitat de la rotació, la precisió del posicionament i
Llarga durabilitat i baixa taxa de fallada. El mecanisme conductor està fet de llautó, que té un bon efecte conductor. La base conductora adopta un aïllament integral, que pot protegir eficaçment el servomotor, el robot i la font d'alimentació de soldadura.
El sistema de control elèctric adopta un PLC Omron japonès per controlar el posicionador, amb un rendiment estable i una baixa taxa de fallades. Els components elèctrics es seleccionen de marques famoses nacionals i internacionals per garantir la qualitat i l'estabilitat d'ús.
L'escut de bloqueig de llum està muntat amb perfil d'alumini i placa de plàstic d'alumini per protegir contra la llum d'arc generada durant la soldadura i el tall.








